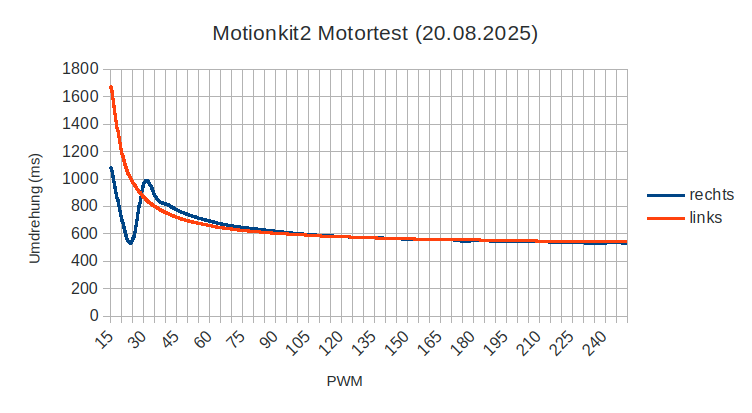
Hallo, ich möchte die Motordrehzahlen des Motionkit mit einem Micropythonprogi messen. Die Räder des MK haben schwarz-weisse Radkappen. 2 IR-Sensoren (rechts, links) erkennen den Hell-Dunkel-Wechsel der an die Pins 5 und 7 des Calliope/Microbit übertragen wird.
Üblicherweise wird eine Zeit zwichen 2 Flankenänderungen über eine Interruptroutine gemessen. Leider finde ich keine Hinweise ob und wie bei Calliope & Co Interrupts in Micropython realisiert werden.